แบบรายงานผลการดำเนินโครงการประจำงวด 1
ชื่อโครงการ หุ่นยนต์เพื่ออุตสาหกรรม
รหัสโครงการ FN64/0055 เลขที่ข้อตกลง
ระยะเวลาดำเนินงาน ตั้งแต่ 1 พฤษภาคม 2565 ถึง 30 กันยายน 2565
รายงานงวดที่ : 1 จากเดือน พฤษภาคม 2565 ถึงเดือน กันยายน 2565
ส่วนที่ 1 ผลการดำเนินโครงการ (แสดงผลการดำเนินงานรายกิจกรรมที่แสดงผลผลิตและผลลัพธ์ที่เกิดขึ้นจริง
| วัตถุประสงค์ที่ตั้งไว้ ผลลัพธ์และตัวชี้วัดผลลัพธ์** กิจกรรมของโครงการ | ผลผลิต* | |
|---|---|---|
| ผลผลิตที่ตั้งไว้ | ผลผลิตที่เกิดขึ้นจริง | |
1. ปฐมนิเทศนักศึกษาใหม่ |
||
วันที่ 5 พฤษภาคม 2565 เวลา 09:00 น.วัตถุประสงค์ที่ตั้งไว้
ผลลัพธ์ที่ตั้งไว้
ผลลัพธ์ที่เกิดขึ้นจริงนักศึกษาเข้าใจหลักการและเหตุผลของการดำเนินการโครงการ กิจกรรมที่กำหนดไว้ในแผน
กิจกรรมที่ทำจริงปฐมนิเทศนักศึกษาที่เข้าร่วมโครงการ
|
26 | 0 |
2. ประเภทหุ่นยนต์อุตสาหกรรมส่วนประกอบ กลไก |
||
วันที่ 7 พฤษภาคม 2565 เวลา 08:00 น.วัตถุประสงค์ที่ตั้งไว้
ผลลัพธ์ที่ตั้งไว้
ผลลัพธ์ที่เกิดขึ้นจริงนักศึกษาเข้าใจระบบกลไกและสามารถแบ่งประเภทของหุ่นยนต์ได้ กิจกรรมที่กำหนดไว้ในแผน
กิจกรรมที่ทำจริงดำเนินการสอนและบรรยายในหัวข้อ ประเภทหุ่นยนต์อุตสาหกรรมส่วนประกอบ กลไก
|
5 | 0 |
3. การกำหนดเส้นทางการเคลื่อนที่ |
||
วันที่ 8 พฤษภาคม 2565 เวลา 08:00 น.วัตถุประสงค์ที่ตั้งไว้
ผลลัพธ์ที่ตั้งไว้
ผลลัพธ์ที่เกิดขึ้นจริงนักศึกษาเข้าใจการวางกรอบเฟรมพืนที่การทำงานของหุ่นยนต์ กิจกรรมที่กำหนดไว้ในแผน
กิจกรรมที่ทำจริงดำเนินการสอนและบรรยาย ตำแหน่ง เฟรม การกำหนดเส้นทางการเคลื่อนที่ ของหุ่นยนต์
|
5 | 0 |
4. ศึกษาตัวขับเคลื่อน เซนเซอร์ ตัวประมวลผล |
||
วันที่ 14 พฤษภาคม 2565 เวลา 08:00 น.วัตถุประสงค์ที่ตั้งไว้
ผลลัพธ์ที่ตั้งไว้
ผลลัพธ์ที่เกิดขึ้นจริงนักศึกษาเข้าใจหลีกการทำงานของตัวขับเคลื่อน เซนเซอร์ ตัวประมวลผล ที่ใช้สำหรับหุ่นยนต์อุตสาหกรรม กิจกรรมที่กำหนดไว้ในแผน
กิจกรรมที่ทำจริงดำเนินการสอนโดยวิธีการบรรยาย ร่วมกับของจริงที่เกี่ยวข้องกับตัวขับเคลื่อน เซนเซอร์ ตัวประมวลผล ที่ใช้สำหรับหุ่นยนต์
|
5 | 0 |
5. การวิเคราะห์จลนพลศาสตร์ สมการพิกัดอ้างอิง XYZ |
||
วันที่ 15 พฤษภาคม 2565 เวลา 08:00 น.วัตถุประสงค์ที่ตั้งไว้
ผลลัพธ์ที่ตั้งไว้
ผลลัพธ์ที่เกิดขึ้นจริงนักศึกษาสามารถเขียน DH parameter ของหุ่นยนต์แบบ 3 แกนได้ นักศึกษาสามารถหาตำแหน่งการเคลื่อนที่แบบไปข้างหน้าของของหุ่นยนต์แบบ 3 แกนได้ กิจกรรมที่กำหนดไว้ในแผน
กิจกรรมที่ทำจริงดำเนินการสอนโดยวิธีการบรรยาย ลงมือปฎิบัติในการวิเคราะห์จลนพลศาสตร์ สมการพิกัดอ้างอิง XYZ ของหุ่นยนต์แบบ 3 แกน
|
4 | 0 |
6. ปฏิบัติการประกอบหุ่นยนต์อุตสาหกรรมแบบ 3 แกน |
||
วันที่ 28 พฤษภาคม 2565 เวลา 08:00 น.วัตถุประสงค์ที่ตั้งไว้
ผลลัพธ์ที่ตั้งไว้
ผลลัพธ์ที่เกิดขึ้นจริงนักศึกษาสามารถประกอบหุ่นยนต์อุตสาหกรรมแบบ 3 แกน (XYZ) ได้ กิจกรรมที่กำหนดไว้ในแผน
กิจกรรมที่ทำจริงดำเนินการประกอบหุ่นยนต์อุตสาหกรรมแบบ 3 แกน (XYZ)
|
4 | 0 |
7. หลักการโปรแกรมหุ่นนยนต์อุตสาหกรรม |
||
วันที่ 5 มิถุนายน 2565 เวลา 08:00 น.วัตถุประสงค์ที่ตั้งไว้
ผลลัพธ์ที่ตั้งไว้
ผลลัพธ์ที่เกิดขึ้นจริงนักศึกษาเข้าใจลักษณะการเขียนโปรแกรมสำหรับหุ่นยนต์อุตสาหกรรม กิจกรรมที่กำหนดไว้ในแผน
กิจกรรมที่ทำจริงดำเนินการสอนโดยวิธีการบรรยาย
|
5 | 0 |
8. ปฎิบัติการโปรแกรมหุ่นยนต์อุตสาหกรรม dobot MG400 การจัดการกับไฟล์ของหุ่นยนต์ |
||
วันที่ 11 มิถุนายน 2565 เวลา 08:00 น.วัตถุประสงค์ที่ตั้งไว้
ผลลัพธ์ที่ตั้งไว้
ผลลัพธ์ที่เกิดขึ้นจริงนักศึกษาสามารถจัดการกับไฟล์สำหรับการเขียนโปรแกรมหุ่นยนต์อุตสาหกรรมได้อย่างถูกต้อง สร้างโปรเจคไฟล์ใหม่ได้ เปิดไฟลเพื่อทำการแก้ไขโปรแกรมได้ ลบไฟล์ที่ไม่ต้องการใช้งานได้ บันทึกไฟล์ได้ กิจกรรมที่กำหนดไว้ในแผน
กิจกรรมที่ทำจริงดำเนินการสอนโดยการบรรยาย ลงมือปฏิบัติการโปรแกรมหุ่นยนต์อุตสาหกรรม dobot MG400
|
5 | 0 |
9. การควบคุมหุ่นยนต์แบบข้อต่อและแกนอ้างอิง |
||
วันที่ 18 มิถุนายน 2565 เวลา 08:00 น.วัตถุประสงค์ที่ตั้งไว้
ผลลัพธ์ที่ตั้งไว้
ผลลัพธ์ที่เกิดขึ้นจริงนักศึกษาสามารถใช้คำสั่ง MOVE J สำหรับควบคุมตำแหน่งการทำงานของเครื่องมือได้ นักศึกษาสามารถใช้คำสั่ง MOVE L สำหรับควบคุมตำแหน่งการทำงานของเครื่องมือได้ กิจกรรมที่กำหนดไว้ในแผน
กิจกรรมที่ทำจริงดำเนินการสอนโดยวิธีการบรรยายและลงมือปฏิบัติการใช้คำสั่ง MOVE J MOVE L ในการควบคุมหุ่นยนต์
|
5 | 0 |
10. การเขียนโปรแกรมสั่งงานเอาต์พุต และอ่านค่าอินพุต สำหรับหุ่นนต์ Dobot MG400 |
||
วันที่ 25 มิถุนายน 2565 เวลา 08:00 น.วัตถุประสงค์ที่ตั้งไว้
ผลลัพธ์ที่ตั้งไว้
ผลลัพธ์ที่เกิดขึ้นจริงนักศึกษาสามารถใช้คำสั่ง DO ในการสั่งงานตัวจับสญูญากาศในการเคลื่อนย้ายตำแหน่งได้ นักศึกษาสามารถใช้คำสั่ง DI ร่วมกับคำสั่ง IF/ELSE ในการสั่งงานให้หุ่นยนต์เคลื่อนที่ไปยังตำแหน่่งต่างๆ ได้อย่างถูกต้อง กิจกรรมที่กำหนดไว้ในแผน
กิจกรรมที่ทำจริงดำเนินการสอนโดยวิธีการบรรยาย และปฏิบัติการใช้คำสั่ง DO เพื่อสั่งงานเอาต์พุตของหุ่นยนต์อุตสาหกรรม ดำเนินการสอนโดยวิธีการบรรยาย และปฏิบัติการใช้คำสั่ง DI เพื่ออ่านค่าอินพุตของหุ่นยนต์อุตสาหกรรม
|
4 | 0 |
11. ปฏิบัติการเขียนโปรแกรมให้หุ่นยนต์ทำงานด้วยภาษา Blockly สำหรับหุ่นยนต์ Dobot MG400 |
||
วันที่ 2 กรกฎาคม 2565 เวลา 08:00 น.วัตถุประสงค์ที่ตั้งไว้
ผลลัพธ์ที่ตั้งไว้
ผลลัพธ์ที่เกิดขึ้นจริงนักศึกษาสามารถเขียนเขียนโปรแกรมให้หุ่นยนต์ทำงานด้วยภาษา Blockly สำหรับหุ่นยนต์ Dobot MG400 ได้ นักศึกษาเขียนโปรแกรมแบบทำซ้ำในการควบคุมตัวขับเคลื่อนที่เป็นสเต็ปเปอร์มอเตอร์ เคลื่อนที่ได้อย่างถูกต้อง กิจกรรมที่กำหนดไว้ในแผน
กิจกรรมที่ทำจริงดำเนินการสอนโดยวิธีการบรรยาย ลงมือปฏิบัติการเขียนโปรแกรมให้หุ่นยนต์ทำงานด้วยภาษา Blockly สำหรับหุ่นยนต์ Dobot MG400 การเขียนโปรแกรมควบคุมสเต็ปเปอร์มอเตอร์
|
4 | 0 |
12. ศึกษาและทดสอบ ติดตั้งระบบหุ่นยนต์อุตสาหกรรม Dobot MG400 |
||
วันที่ 9 กรกฎาคม 2565 เวลา 08:00 น.วัตถุประสงค์ที่ตั้งไว้
ผลลัพธ์ที่ตั้งไว้
ผลลัพธ์ที่เกิดขึ้นจริงนักศึกษาสามารถทำการเขียนโปรแกรมแบบ teach and playback สำหรับหุ่นยนต์จำนวน 2 ตัวให้ทำงานร่วมกันได้ โดยวิธีการที่เรียกว่า IO Link นักศึกษาสามารถทำการเขียนโปรแกรมแบบ ฺBlockly สำหรับหุ่นยนต์จำนวน 2 ตัวให้ทำงานร่วมกันได้ โดยวิธีการที่เรียกว่า IO Link กิจกรรมที่กำหนดไว้ในแผน
กิจกรรมที่ทำจริงดำเนินการสอนโดยวิธีการบรรยาย ลงมือปฏิบัติการติดตั้งระบบหุ่นยนต์อุตสาหกรรม Dobot MG400
|
6 | 0 |
13. ปฏิบัติการต่อสัญญาณทางไฟฟ้าของเซ็นเซอร์และแอคชูเอเตอร์ |
||
วันที่ 16 กรกฎาคม 2565 เวลา 08:00 น.วัตถุประสงค์ที่ตั้งไว้
ผลลัพธ์ที่ตั้งไว้
ผลลัพธ์ที่เกิดขึ้นจริงนักศึกษาสามารถต่อเซนเซอร์สำหรับตรวจจับโลหะ ที่มีเอาต์พุตชนิด PNP กับหุ่นยนต์อุตสาหกรรมได้ นักศึกษาสามารถต่อเซนเซอร์สำหรับตรวจจับวัตถุ ที่มีเอาต์พุตชนิด NPN กับหุ่นยนต์อุตสาหกรรมได้ นักศึกษาสามารถต่อสัญญาณไฟฟ้าสำหรับควบคุมการทำงานของตัวขับสเต็ปเปอร์มอเตอร์ได้ กิจกรรมที่กำหนดไว้ในแผน
กิจกรรมที่ทำจริงดำเนินการสอนโดยวิธีการบรรยาย ลงมือปฏิบัติการต่อสัญญาณทางไฟฟ้าของเซ็นเซอร์และแอคชูเอเตอร์
|
6 | 0 |
14. ปฏิบัติการต่อระบบนิวเมติกและการควบคุม ปฏิบัติการ IoT และไมโครคอนโทรลเลอร์ |
||
วันที่ 23 กรกฎาคม 2565 เวลา 08:00 น.วัตถุประสงค์ที่ตั้งไว้
ผลลัพธ์ที่ตั้งไว้
ผลลัพธ์ที่เกิดขึ้นจริงนักศึกษาสามารถต่อระบบนิวเมติกในการหยีบวัตถุ และเคลื่อนย้ายวัตถุได้ นักศึกษาสามารถต่อสัญญาณทางไฟฟ้าในการสื่อสารกันระหว่างหุ่นยนต์อุตสาหกรรมกับระบบไมโครคอนโทรลเลอร์ขนาดเล็กได้ กิจกรรมที่กำหนดไว้ในแผน
กิจกรรมที่ทำจริงดำเนินการสอนโดยวิธีการบรรยาย ลงมือปฏิบัติการต่อระบบนิวเมติกและการควบคุม ปฏิบัติการ IoT และไมโครคอนโทรลเลอร์
|
6 | 0 |
15. ปฏิบัติการประยุกต์ใช้หุ่นยนต์อุตสาหกรรมและเครื่องจักรกลอัตโนมัติ |
||
วันที่ 30 กรกฎาคม 2565 เวลา 08:00 น.วัตถุประสงค์ที่ตั้งไว้
ผลลัพธ์ที่ตั้งไว้
ผลลัพธ์ที่เกิดขึ้นจริงนักศึกษาสามารถใช้หุ่นยนต์อุตสาหกรรม Dobot MG400 ทำงานร่วมกับเครื่องจักรกลอัตโนมัติได้ กิจกรรมที่กำหนดไว้ในแผน
กิจกรรมที่ทำจริงดำเนินการสอนโดยวิธีการบรรยาย ลงมือปฏิบัติการประยุกต์ใช้หุ่นยนต์อุตสาหกรรมและเครื่องจักรกลอัตโนมัติ
|
5 | 0 |
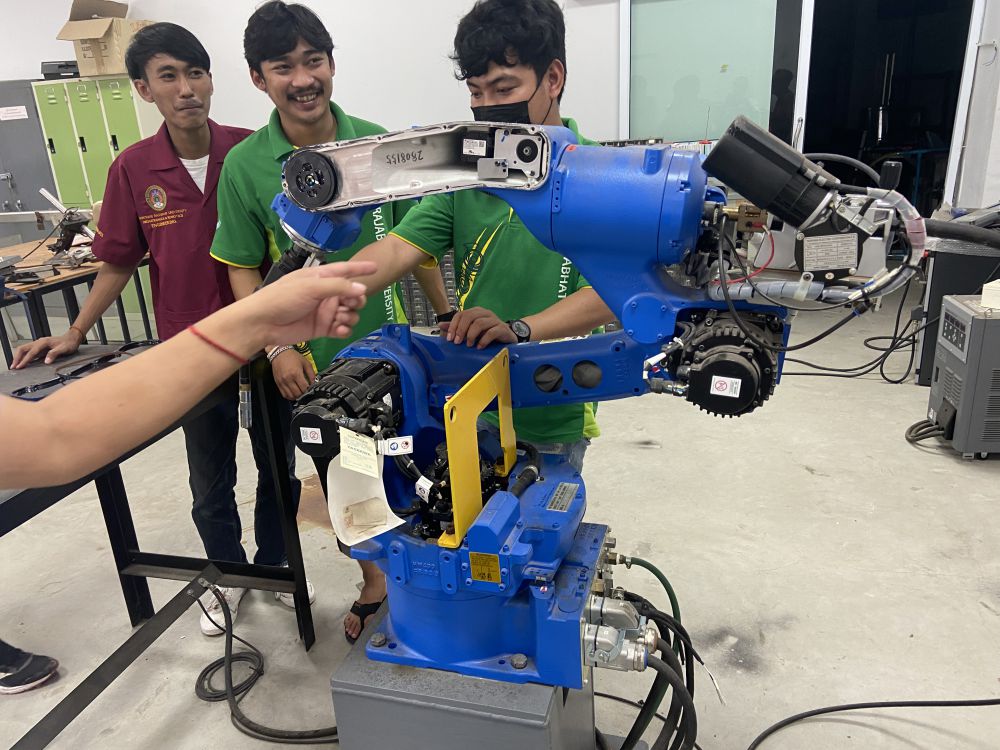
16. ปฏิบัติการฝึกความชำนาญเกี่ยวกับการทำงานหุ่นยนต์อุตสาหกรรม การบำรุงรักษา |
||
วันที่ 1 สิงหาคม 2565 เวลา 08:00 น.วัตถุประสงค์ที่ตั้งไว้
ผลลัพธ์ที่ตั้งไว้
ผลลัพธ์ที่เกิดขึ้นจริงนักศึกษาจำนวน 23 ได้เข้าฝึกปฏิบัติงานในสถานประกอบ บริษัทอุดรมาสเตอร์เทค จำกัด และห้องปฏิบัตืการหุ่นยนต์เชื่อมอุตสาหกรรม กิจกรรมที่กำหนดไว้ในแผน
กิจกรรมที่ทำจริงปฏิบัติงานในสถานประกอบการ หรือหน่วยงานภาครัฐ
|
23 | 0 |






































* ผลผลิต หมายถึง ผลที่เกิดขึ้นเชิงปริมาณจากการทำกิจกรรม เช่น จำนวนผู้เข้าร่วมประชุม จำนวนผู้ผ่านการอบรม จำนวนครัวเรือนที่ปลูกผักสวนครัว เป็นต้น
** ผลลัพธ์ หมายถึง การเปลี่ยนแปลงที่นำไปสู่การแก้ปัญหา เช่น หลังอบรมมีผู้ปรับเปลี่ยนพฤติกรรมจำนวนกี่คน มีข้อบังคับหรือมาตรการของชุมชนที่นำไปสู่การปรับเปลี่ยนพฤติกรรมหรือสภาพแวดล้อม เป็นต้น ทั้งนี้ต้องมีข้อมูลอ้างอิงประกอบการรายงาน เช่น ข้อมูลรายชื่อแกนนำ , แบบสรุปการประเมินความรู้ , รูปภาพกิจกรรมพร้อมคำอธิบายใต้ภาพ เป็นต้น
ส่วนที่ 2 ประเมินความก้าวหน้าของการดำเนินงานโครงการและปัญหา/อุปสรรคในการดำเนินโครงการ
ประเมินความก้าวหน้าของการดำเนินงานโครงการ
| การดำเนินงานเมื่อเทียบกับการดำเนินงานทั้งโครงการ | ทั้งหมด | ทำแล้ว | 10% | 20% | 30% | 40% | 50% | 60% | 70% | 80% | 90% | 100% |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| การทำกิจกรรม | 21 | 16 | ✔ | |||||||||
| การใช้จ่ายงบประมาณ | 780,000.00 | 690,000.00 | ✔ | |||||||||
| คุณภาพกิจกรรม | 64 |
ปัญหา/อุปสรรคในการดำเนินงานโครงการ (สรุปเป็นข้อ ๆ)
| ประเด็นปัญหา/อุปสรรค | สาเหตุเพราะ | แนวทางการแก้ไขของผู้รับทุน |
|---|---|---|
แผนงาน/กิจกรรม ที่จะดำเนินการในงวดต่อไป
(................................)
ผู้รับผิดชอบโครงการ